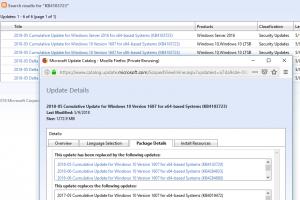
§> Общие вопросы. Переменные объявляемые пользователем.
Итак, язык C - типичный представитель абстрактных языков программирования, а это значит, что его совершенно не интересует какого рода информацию мы будем обрабатывать, будь то содержимое компьютерного файла или внутренние управляющие регистры микроконтроллера.
Основной объект программирования для классического Си - переменная. Это может быть одиночная или группа особым образом связанных переменных, например, массив или структура. По сути переменная представляет из себя некое хранилище для числа, имеющее своё уникальное имя и допустимый диапазон значений, выходить за пределы которого крайне нежелательно. И первое что мы должны сделать перед тем как начать использовать имя переменной в тексте программы это познакомить программу с её свойствами. В языке Си этот процесс называется объявлением переменной.
Зачем нужно объявлять переменные?
Хоть язык Си и абстрактный, используемый разработчиком микроконтроллер, как правило, вполне конкретный и имеет своё адресное пространство памяти с заданными свойствам, где и будет храниться объявляемая переменная. Объявление, помимо присвоения переменной имени, заставляет компилятор разместить её по конкретному адресу в памяти микроконтроллера (по какому именно нас в большинстве случаев совершенно не интересует).
Как нужно объявлять переменные?
Правило для объявления можно формулировать так: до того как мы впервые употребим имя переменной в тексте нашей программы, необходимо размесить её объявление в следующем формате:
Type name; // Переменная с именем "name" и типом "type".
Здесь: type - так называемый идентификатор типа переменной из определённого набора стандартных типов;
name - произвольное имя переменной, лишь бы оно не начиналось с цифры, состояло только из латинских символов, и не совпадало со служебными словами языка Си (список которых не так велик, чтобы столкнуться с такой ситуацией нужно на самом деле очень постараться).
Что такое идентификатор типа и зачем его упоминать?
Для хранения переменной микроконтроллер использует ячейки памяти, размер которых определяется его разрядностью. Так например, микроконтроллеры семейства AVR - 8-разрядные, а значит для хранения данных используют ячейки памяти размером в один байт, которые способны сохранять 256 различных числовых значений. Если ожидаемые значения переменной могут превысить это количество, то для её хранения понадобится две или более ячеек памяти. Поскольку Си, строго говоря, не представляет какие значения мы планируем присваивать переменной, то просит нас указать её тип, который как раз и определяет допустимый диапазон значений. Это необходимо чтобы не зарезервировать за ней избыточный или недопустимо малый объём памяти, а так же предупреждать нас при попытке присвоить слишком большое значение переменной, не способной его сохранить. Для 8-разрядных микроконтроллеров наиболее часто употребимые целочисленные типы данных следующие:
Способные хранить только положительные значения (беззнаковые):
unsigned char - занимает один байт памяти, значения 0...255
unsigned int - два байта, значения 0...65535
unsigned long - четыре байта, от 0 до (2^32)-1
способные хранить значения со знаком (знаковые):
signed char - занимает один байт памяти, от -128...127
signed int - два байта, значения -32768...32767
signed long - требует четыре байта, значения от -(2^31) до (2^31)
Ключевое слово "unsigned" (беззнаковое), вообще говоря, можно не употреблять, поскольку в Си по умолчанию тип, для которого не указан этот признак, считается беззнаковым.
Для работы с дробными числами в Си предусмотрены типы с плавающей точкой:
Float – 32 бита, значения от ±1.18E-38 до ±3.39E+38
double – 32 (±1.18E-38…±3.39E+38) или 64 бита (±2.23E-308…±1.79E+308) в зависимости от настроек компилятора.
Примечание: размер памяти для хранения переменных указанных типов и диапазон допустимых значений может незначительно меняться в зависимости от среды разработки или семейства микроконтроллеров.
Для того чтобы перед началом использования переменной она уже имела конкретное значение, к объявлению часто дописывается инициализатор: знак равенства (в Си это оператор присваивания) и начальное значение переменной.
Например:
Int A=100; // Переменная с именем "А" типом int и начальным значением равным 100.
Практический пример: пусть планируется написать программу, мигающую светодиодом 5 раз. Для подсчёта числа миганий потребуется переменная, значение которой, очевидно никогда не будет отрицательным и не выйдет за пределы диапазона от 0 до 255, а значит в данном случае будет вполне достаточно использовать однобайтовый тип char:
§> Область видимости переменной.
Источником многих затруднений для начинающих становится свойство языка, которое называется областью видимости объявленной переменной. Язык Си имеет возможность ограничить действие переменной конкретной областью программного кода, при этом в других частях программы она становится недоступной, благодаря чему высвобождается память, которая на других участках программы может использоваться другими переменными. Такие переменные называются локальными, а их использование - основной способ получения экономичного кода.
На начальном этапе обучения все переменные желательно объявлять как глобальные. Для этого их объявления необходимо размещать в самом начале программы до и вне каких либо функций. В этом случае Вы можете быть уверены, что они будут доступны для работы в любом месте программы в пределах текущего файла.
§> Область размещения переменной.
Как известно, микроконтроллеры семейства AVR содержат три области памяти, реализованные по разным технологиям. Каждая из них имеет своё назначение и адресное пространство, нумерованное от нуля до максимального значения для конкретной модели:
Для хранения пользовательских переменных может быть использована ОЗУ, энергонезависимая память EEPROM, а для хранения констант, значение которых не может быть изменено в процессе работы программы также и FLASH- память микроконтроллера.
Для начала полезно знать, что переменные, объявленные пользователем без использования специальных ключевых слов типа _eeprom или _flash, размещаются в ОЗУ микроконтроллера, в виде одной или нескольких ячеек статической памяти SRAM. В процессе работы они периодически копируются в быструю регистровую память РОН, которая непосредственно взаимодействует с арифметически-логическим блоком АЛУ микроконтроллера.
Вопросы размещения переменных внутри ОЗУ, как правило, представляют интерес только в контексте быстродействия программы.
§> Регистры специального назначения микроконтроллера SFR.
Итак, мы кратко рассмотрели объявление переменных предназначенных для организации вычислительного процесса, которые мало связаны со спецификой аппаратной части МК.
Управление и контроль работы микроконтроллера и его отдельных внутренних модулей осуществляется путём записи и чтения специальных ячеек-регистров в служебной области памяти ОЗУ - регистров специального назначения (Special Function Register, далее просто SFR).
Основная идея, позволяющая использовать Си для программирования микроконтроллеров, такова: регистры специального значения являются такими же переменными языка Си, как и объявленные пользователем. Этим переменным можно присваивать значения, управляя работой микроконтроллера, или считывать их, получая таким образом информацию о его текущем состоянии. Объявлять регистры микроконтроллера подобно пользовательским переменным не нужно по нескольким причинам. Во-первых, их размер заранее известен: в Си для AVR это беззнаковые 8-разрядные переменные. Во-вторых, SFR имеют строго определённые имена и адреса в памяти, являясь так называемыми регистрами ввода-вывода.
Тем не менее знакомить программу с регистрами спецназначения нужно, и делается это с помощью подключения так называемых заголовочных файлов.
В начале любой программы на Си мы можем видеть строки типа:
#include "file1.h" // Включить в код содержимое файла "file1.h".
#include - это директива (указание), заставляющая среду разработки поместить в данное место программы содержимое файла с именем file1.h. Файлы с расширением.h называются заголовочными или h-файлами. Разработчик может создавать собственные h-файлы и помещать их, учитывая содержимое, в любое место программы. Однако, чтобы познакомить программу с SFR для данного типа микроконтроллера, необходимо подключать вполне конкретные заголовочные файлы. Их имена и количество зависит от конкретной среды разработки и типа используемого микроконтроллера, так, например, в IAR для Atmega64 достаточно прописать строки:
#include "iom64"
#include "inavr.h"
После включения в текст необходимых h-файлов программа будет узнавать упоминаемые в ней имена SFR, например, регистр статуса микроконтроллера AVR с именем SREG, буфер приёма/передачи модуля UART - UDR и так далее.
Заготовка программы для IAR, которая ничего не делает, но уже не "ругается" на имена регистров специального назначения микроконтроллера Atmega16, должна выглядеть так:
#include "iom16.h"
#include "inavr.h"
unsigned char ChisloMiganiy=0;
void main (void)
{
// Здесь мы разместим программу, использующую переменную ChisloMiganiy
// и любые регистры Atmega16, имена которых прописаны в файле iom16.h.
}
Хочется надеяться, что читатель знаком с правилами оформления комментариев в тексте программы. Это заметки, которые игнорируются языком Си и не считаются частью программного кода, если записаны в одной и более строках, заключённых между символами /* и */, или в одной строке, начинающейся с последовательности //.
§> Обзор стандартных операций с регистрами.
Настало время перейти к более серьёзным операциям над регистрами и программными переменными. Управление работой микроконтроллера в большинстве случаев сводится к следующему простому набору действий с его регистрами:
1. Запись в регистр необходимого значения.
2. Чтение значения регистра.
3. Установка в единицу нужных разрядов регистра.
4. Сброс разрядов регистра в ноль.
5. Проверка разряда на логическую единицу или логический ноль.
6. Изменение логического состояния разряда регистра на противоположное.
Во всех указанных действиях принимает участие оператор присваивания языка Си, записываемый в виде знака равенства. Принцип действия оператора примитивно прост - он записывает в регистр или переменную расположенную слева от него, значение того, что записано справа. Справа может находится константа, другой регистр, переменная либо состоящее из них выражение, например:
A = 16; // Присвоить переменной A значение 16;
A = B; // Считать значение переменной B и присвоить это значение переменной A;
A = B+10; // Считать значение переменной B, прибавить к считанному значению 10, результат присвоить переменной A (значение переменной B при этом не изменяется).
§> Запись и чтение регистров.
Из рассмотренных примеров видно, что оператор присваивания сам по себе решает две первые задачи — запись и чтение значений регистров. Например для отправки микроконтроллером AVR байта по шине UART достаточно записать его в передающий регистр с именем UDR:
UDR = 8; // Отправить по UART число 8;
Чтобы получить принятый по UART байт достаточно считать его из регистра UDR:
§> Установка битов регистров.
Язык Си не имеет в своём составе команд непосредственного сброса или установки разрядов переменной, однако присутствуют побитовые логические операции "И" и "ИЛИ", которые успешно используются для этих целей.
Оператор побитовой логической операции "ИЛИ" записывается в виде вертикальной черты - "|" и может выполнятся между двумя переменными, а так же между переменной и константой. Напомню, что операция "ИЛИ" над двумя битами даёт в результате единичный бит, если хотя бы один из исходных битов находится с состоянии единицы. Таким образом для любого бита логическое "ИЛИ" с "1" даст в результате "1", независимо от состояния этого бита, а "ИЛИ" с логическим "0" оставит в результате состояние исходного бита без изменения. Это свойство позволяет использовать операцию "ИЛИ" для установки N-ого разряда в регистре. Для этого необходимо вычислить константу с единичным N-ным битом по формуле 2^N, которая называется битовой маской и выполнить логическое "ИЛИ" между ней и регистром, например для установки бита №7 в регистре SREG:
(SREG | 128) — это выражение считывает регистр SREG и устанавливает в считанном значении седьмой бит, далее достаточно изменённое значение снова поместить в регистр SREG:
SREG = SREG | 128; // Установить бит №7 регистра SREG.
Такую работу с регистром принято называть "чтение - модификация - запись", в отличие от простого присваивания она сохраняет состояние остальных битов без именения.
Приведённый программный код, устанавливая седьмой бит в регистре SREG, выполняет вполне осмысленную работу - разрешает микроконтроллеру обработку программных прерываний. Единственный недостаток такой записи — в константе 128 не легко угадать установленный седьмой бит, поэтому чаще маску для N-ного бита записывают в следующем виде:
(1< SREG = SREG | (1<<7); Или ещё проще с использование краткой формы записи языка Си: SREG |= (1<<7); Которая означает - взять содержимое справа от знака равенства, выполнить между ним и регистром слева операцию, стоящую перед знаком равенства и записать результат в регистр или переменную слева.
§> Сброс битов в регистрах. Ещё одна логическая операция языка Си – побитовое "И", записывается в виде символа "&". Как известно, операция логического "И", применительно к двум битам даёт единицу тогда и только тогда, когда оба исходных бита имеют единичное значение, это позволяет применять её для сброса разрядов в регистрах. При этом используется битовая маска, в которой все разряды единичные, кроме нулевого на позиции сбрасываемого. Её легко получить из маски с установленным N-ным битом, применив к ней операцию побитного инвертирования: SREG = SREG & (~ (1<<7)); или кратко: SREG &= ~ (1<<7); В упомянутом ранее заголовочном файле для конкретного микроконтроллера приведены стандартные имена разрядов регистров специального назначения, например:
#define OCIE0 1 Здесь #define – указание компилятору заменять в тексте программы сочетание символов "OCIE0" на число 1, то есть стандартное имя бита OCIE0, который входит в состав регистра TIMSK микроконтроллера Atmega64 на его порядковый номер в этом регистре. Благодаря этому установку бита OCIE0 в регистре TIMSK можно нагляднее записывать так: TIMSK|=(1< Устанавливать или сбрасывать несколько разрядов регистра одновременно можно, объединяя битовые маски в выражениях оператором логического "ИЛИ": PORTA |= (1<<1)|(1<<4); // Установить выводы 1 и 4 порта A в единицу; Пример использования с регистрами, определенными в CMSIS: DAC0->CTRL |= DAC_CTRL_DIFF; // установка
§> Проверка разрядов регистра на ноль и единицу. Регистры специального назначения микроконтроллеров содержат в своём составе множество битов-признаков, так называемых "флагов”, уведомляющих программу о текущем состоянии микроконтроллера и его отдельных модулей. Проверка логического уровня флага сводится к подбору выражения, которое становится истинным или ложным в зависимости от того установлен или сброшен данный разряд в регистре. Таким выражением может служить логическое "И” между регистром и маской с установленным разрядом N на позиции проверяемого бита:
(REGISTR & (1< Приведённое выражение можно использовать в условном операторе if (выражение) или операторе цикла while (выражение), которые относятся к группе логических, то есть воспринимают в качестве аргументов значения типа истина и ложь. Поскольку язык Си, приводя числовые значения к логическим, любые числа не равные нулю воспринимает как логическую истину, значение (REGISTR & (1< While (!(UCSRA & (1< Здесь при сброшенном бите UDRE выражение (UCSRA & (1<
§> Изменение состояния бита регистра на противоположное. Эту, с позволения сказать, проблему с успехом решает логическая операция побитного "ИСКЛЮЧАЮЩЕГО ИЛИ” и соответствующий ей оператор Си, записываемый в виде символа " ^ ”. Правило "исключающего или" с двумя битами даёт "истину” тогда и только тогда, когда один из битов установлен, а другой сброшен. Не трудно убедиться, что этот оператор, применённый между битовой маской и регистром, скопирует в результат биты стоящие напротив нулевых битов маски без изменения и инвертирует расположенные напротив единичных. Например, если: reg=b0001 0110 и mask=b0000 1111, то reg^mask=b0001 1001. Таким способом можно менять состояние светодиода, подключенного к пятому биту порта A:
#define LED 5 // Заменять в программе сочетание символов LED на число 5 (вывод светодиода).
§> Арифметика и логика языка Си. Мы рассмотрели типичный набор операций, используемый при работе с регистрами микроконтроллера. Помимо них в арсенале языка имеется ряд простейших арифметических и логических операций, описания которых можно найти в любом справочнике по Си, например: Преобразование типов переменных – это часть внутренней автоматической работы компилятора, происходящая в строгом соответствии с правилами языка программирования. Сам разработчик при написании программы в явном виде этим, как правило, не занимается. Однако, неаккуратное объявление типов переменных, или присвоение переменной значения превышающего допустимый диапазон, и даже неправильный формат записи константы, могут привести к потере данных и некорректной работе программы, при полном молчании компилятора.
§> Преобразование типа выражения перед присвоением переменной. В первом разделе мы обращали своё внимание на необходимость явного указания типа объявляемой переменной. Это позволяет компилятору зарезервировать за ней нужное количество адресного пространства и определить диапазон значений, которые она способна хранить. Тем не менее, мы не застрахованы он того, что в процессе выполнения программы произойдёт попытка записать в переменную значение свыше предельно допустимого. В самых грубых случаях компилятор выдаст нам сообщение о возможной ошибке. Например, при желании записать в переменную типа unsigned char (диапазон от 0 до 255) число 400: Unsigned char a=400; // выдаст сообщение типа "integer conversion resulted in truncation” Компилятор предупреждает нас о том, что произошла попытка записать числовое значение, требующее для хранения два байта (400 это 1 в старшем байте и 144 в младшем) в однобайтовую переменную. Однако тех случаях, когда присваиваемое выражение содержит переменные, и компилятор мог бы заметить возможную потерю данных, он освобождает себя от этой обязанности, например: Unsigned char x=200, y=200; При таком варианте, не смотря на то, что значение выражение (x+y) так же равно 400, никаких предупреждений со стороны компилятора уже не последует. А в переменную x запишется только младший байт числа 400, то есть 144. И здесь компилятор трудно в чём-то упрекнуть, ведь вместо явно проинициализированной переменной в выражении может быть использован, например, приёмный регистр шины UART, в котором может оказаться любое значение, принятое от внешнего устройства. Float a=1.5; // Объявлена переменная с плавающей точкой. В результате в переменной b сохранится только целая часть результата a*b – число 4.
§> Преобразование результата выражения к типу наиболее точной переменной в выражении. При таком преобразовании компилятор руководствуется следующим правилом: прежде чем начнется вычисление выражения, операторы с "низшим” типом повышаются до "высших” при этом результат также приводится к ”высшему” типу. Какой тип нужно считать ”высшим”? Тот, который без потери точности может сохранить любое допустимое значение другого типа. Так, в предыдущем примере: Float a =1.5; // Объявлена переменная a с плавающей точкой. В выражении (a*b) переменная float a имеет более высокий тип, потому что может сохранять любое целое значение из диапазона 0…255 типа char. Результат выражения (a*b) будет иметь тип float. Char a=3; // Объявлена целочисленная переменная. В отличие от предыдущего примера, результат записывается в переменную способную хранить числа с плавающей точкой, однако компилятор в соответствии с правилом приведения, получив в результате деления число 0,75 приводит его к типу целочисленных операндов, отбросив дробную часть. В результате в переменную "c” будет записан ноль. Int ADC; // Двухбайтовая целочисленная переменная для хранения кода АЦП. Здесь упущено из виду то, что константа в Си, как и любая переменная, тоже имеет свой тип. Его желательно указывать явно или, используя соответствующую форму записи. Константы 5 и 1024 записаны без десятичной точки и будут восприняты языком Си как целочисленные. Как следствие, результат выражения (5/1024) тоже будет приведён к целому – 0 вместо ожидаемого 0,00489. Это не случилось бы при записи выражения в формате (5.0/1024). C= (float) a/b; // Ожидается, что "c" будет равно 0,75 (¾);
§> Назначение функций. Ещё древние программисты обратили своё внимание на один занимательный факт – зачастую программа вынуждена несколько раз выполнять ровно одну и ту же последовательность действий. Именно тогда родилась идея при достаточно большом наборе таких действий и их повторов, с целью экономии программной памяти, оформлять их в виде отдельной группы, а затем при необходимости просто отправлять программу на её выполнение. Такой обособленный кусок кода в Си как раз и называется функцией. Само название термина "функция” исконно отражает другое свойство некоторых функций – способность (подобно функциям математическим) преобразовывать по заданному алгоритму некие входные данные. Но этом немного позже. Другое назначение функции, полностью отражющее её название – это выделение в отдельную группу действий связанных одной общей целью, например, функция инициализации портов или функция опроса клавиатуры. Это и есть одно из дополнительных предназначений функции. 1. Наличие одинаковых, достаточно больших и многократно повторяющихся наборов действий. Здесь нужно сразу сделать важную оговорку. Дело в том, при каждом переходе на функцию и возврате из неё микроконтроллер вынужден сохранять некоторые системные данные, например адрес программы, с которого произошёл переход в функцию, а это требует дополнительных временных ресурсов. Нужно учитывать этот факт и стараться не плодить в программе множество коротких функций, если есть возможноть объединить их в одну общую.
§> Структура и оформление функций. В любой функции структурно легко выделить две составные части: заголовок и тело функции. Тип выходной переменной Имя функции (Типы входных переменных и их имена через запятую) Временно опустим рассмотрение содержимого заголовка до и после имени и рассмотрим функции, которые не обрабатывают никаких данных. Они предназначены только для выполнения определённых действий. В заголовках таких функций нужно указать названия пустого типа – void (англ. вакуум, пустота): Void имя функции (void) В качестве имени можно использовать любое слово, отражающее смысл выполняемых функцией действий, лишь бы оно не начиналось с цифры. Уже сейчас мы можем вызвать выполнение нашей функции из любого места программы. Для этого нужно записать имя функции, круглые скобки и символ точки с запятой. Например, функцию с заголовком: Initialization (); Тело функции это набор команд расположенный между первой открывающейся фигурной скобкой после заголовка и соответствующей ей закрывающейся фигурной скобкой. Пояснение: наборы действий внутри фигурных скобок в Си принято называть блоками. Они логически связывают несколько одиночных действий в одно сложное, которое либо полностью выполняется, либо полностью игнорируется в зависимости от контекста программы. В данном случае тело функции представляет собой блок команд, которые функция обязана выполнить от начала и до конца. Таким образом, программа, встретив переход на функцию, выполнит содержимое блока и по последней закрывающей скобке вернётся туда, откуда была вызвана. Void initialization (void) Проинициализировав направление выводов портов A, B и С, вернётся в следующую после её вызова строчку.
§> Обработка параметров функцией. Всё функции могут обрабатывать и изменять значения специализированных регистров микроконтроллера и так называемых глобальных переменных, то есть тех, которые объявлены пользователем в самом начале программы вне каких либо функций. Помимо этого имеется возможность передавать данные в функцию для обработки непосредственно в момент её вызова. Это просто удобно и ничего больше. Такое оформление заголовка будет означать, что функция способна принимать в качестве параметров два числа типа char с именами FrameLength и StopBit. Теперь при вызове функции компилятор не позволит оставить круглые скобки пустыми и потребует передачи конкретных значений, через запятую, например: InitUart (8, 2); После этого внутри функции переменным с именами FrameLength и StopBit присвоятся конкретные значении 8 и 2, которые можно использовать, например, для настройки длинны посылки модуля UART и количества его стоп-битов: Void initUart (char FrameLength, char StopBit)
§> Специализированные функции. Мы рассмотрели функции, задаваемые самим пользователем. Помимо них в любой программе присутствуют функции, которые выполняют специализированные задачи и должны быть оформлены по особым правилам. Очевидно, что любая программа представляет собой совокупность действий, описанных в соответствии с правилами языка программирования и предназначенных для исполнения конкретным устройством, в данном случае микроконтроллером. Каков порядок выполнения этих действий на практике, мы и попытаемся уяснить в данном разделе.
§> Общая структура простейшей программы. Инициализация, фон. При рассмотрении программы на уровне языка Си можно сказать, что она начинает свою работу с первой строки функции main (строка 001 на рисунке): Поскольку любая программа предназначена для непрерывной работы, нормальный режим её функционирования - это безостановочное повторение по кругу содержимого бесконечного цикла. На практике такой цикл чаще всего реализуется с помощью конструкции while(1) { }, предназначенной для многократного выполнения действий, размещённых внутри её фигурных скобок. Содержимое бесконечного цикла программы называется фоном. Именно здесь происходит основная часть работы по проверке состояния аппаратной части и соответствующее воздействие на неё для получения нужного результата. Рассмотрим описанную структуру программы на простейшем примере. Пусть необходимо: отправлять по шине UART символ *, пока кнопка на выводе PA0 находится в нажатом состоянии (нулевой уровень сигнала). Программа в данном случае (без лишних процедур по подавлению дребезга кнопки и прочего) может выглядеть так: Void main (void) Здесь конструкция if (...), расположенная в фоне программы проводит бесконечные опросы входного регистра PINA и проверку вывода PA0 на наличие низкого уровня. Далее выполняются другие действия фонового процесса, обозначенные строками 00N, 00N+1 и так далее. Какие факторы, применительно к данной программе, определяют самые важные параметры её работы - надёжность и быстродействие? Из примера видно, что частота опроса входа PA.0 определяется длительностью выполнения команд фона, ведь прежде чем в очередной раз опросить кнопку, микроконтроллер должен выполнить следующие за этим строки 00N, 00N+1 и т. д. Очевидно, что надёжность фиксации внешнего события (нажатия на кнопку) в данном случае будет зависеть от соотношения длительности воздействия этого события к периоду его детектирования. Длительность фона в данной программе наверняка будет во много раз меньше длительности удержания кнопки, которое на практике составляет несколько десятков миллисекунд. Однако при разрастании фоновой части программы и малом времени внешнего воздействия, надёжность его отслеживания в определённый момент резко снизится. Что бы этого не произошло, а также для снижения времени реакции программы на внешнее событие, используется система прерываний.
§> Прерывания. Как работает механизм прерываний? Очень просто, особенно на уровне языка Си! В архитектуру микроконтроллеров AVR, впрочем как и любых других, на аппаратном уровне заложена способность отслеживать определённые "интересные состояния железа” и устанавливать при этом соответствующие биты-признаки. Такие состояния называются условиями возникновения прерываний, а устанавливаемые признаки - флагами прерываний. В процессе работы, микроконтроллер непрерывно отслеживает состояние этих флагов. При обнаружении любого установленного флага прерывания, при условии, что оно разрешено включением соответствующего бита, а также установлен бит глобального разрешения прерываний (№7 в регистре SREG для AVR), выполнение основной части программы будет временно приостановлено (прервано). Поскольку прерывание может возникнуть при выполнении любой произвольной команды фона, её адрес запоминается в так называемом программном стеке. После чего, выполнение предается на часть программы, специально написанную разработчиком для реакции на событие, вызвавшее данное прерывание. Эта небольшая часть программы называется обработчиком прерывания. Когда обработчик будет выполнен до конца, программа, воспользовавшись адресом, сохранённым в программном стеке, вернётся в то место, откуда была вызвана для обработки данного прерывания. Какова роль программиста в этом процессе? При разработке на Си она сведена к минимуму. 1. Разрешить использование прерываний в программе. Применительно к нашему примеру организовать отправку в UART по низкому уровню на входе кнопки, можно используя так называемое внешнее прерывание INT0. Данное прерывание вызывается по фронту, срезу или нулевому уровню на выводе INT0. Перенесем кнопку на вывод PD.2 с альтернативной функцией INT0. В инициализационной части программы разрешим прерывания глобально и INT0 конкретно. Микроконтроллер по-умолчанию настроен на формирование прерывания INT по низкому уровню входного сигнала, поэтому дополнительных настроек не потребуется. Остаётся объявить за пределами функции main обработчик INT0, отправляющий в UART символ *: Void main (void)
#pragma vector=INT0_vect // Обработчик прерывания INT0/ Здесь обработчик прерывания объявлен в формате компилятора IAR. Принципиально в нём только имя вектора прерывания - INT0_vect, компилятор заменяет его на адрес памяти программ, на который передаётся выполнение программы при возникновении данного прерывания. Имя самого обработчика INT0_INTPT выбирается произвольно. Названия векторов всех возможных прерываний для данного МК описаны в h-файлах. Теперь время реакции на нажатие кнопки не зависит от длительности фона программы и составляет несколько тактов микроконтроллера, а вероятность пропустить это событие равна нулю. Таким образом, прерывание – отличный способ реакции на событие, требующее немедленной обработки. Это и есть его главное предназначение. Хочется сразу упомянуть одно негласное правило относительно обработчиков прерываний, хоть это и достаточно узкий вопрос. В них следует размещать только то, что на самом деле необходимо для быстрой реакции на прерывание. Все остальные действия, которые можно отложить, необходимо размещать в фоне. Взято с сайта Именно с идеи создания собственного пультика для управления светом в комнате и началось моё увлечение электроникой, микроконтроллерами и различными радиоустройствами. После этого я начал изучать данную тему, знакомиться с основами электроники, примерами устройств, узнавать, как люди реализуют подобного рода устройства. Поискав информацию на тему того, с чего можно было бы начать изучение микроконтроллеров я узнал о том, что такое Arduino, с чем их едят, о том, как с ними работать. Легкое решение выглядело весьма привлекательно, ведь насколько я понял на тот момент, код собирается на раз-два. Но сделав вывод, что я не узнаю, что творится внутри микроконтроллера за рамками Arduino-скетчей я решил поискать более интересный вариант, который подразумевал глубокое изучение и погружение в дебри микроконтроллерной техники. В компании, в которой я работаю, имеется отдел разработки, и я решил обратиться к инженерам чтобы они направили меня на путь истинный и показали с чего можно было бы начать решение своей задачи. Меня решительно отговорили от изучения Arduino и у меня в руках оказалась неведомая и непонятная зеленая платка на которой виднелись надписи, буковки, разные электронные компоненты. Всё это для меня на тот момент показалось непостижимо сложным, и я даже пришел в некоторое смятение, но от реализации поставленной задачи отказываться не собирался. Так я познакомился с семейством микроконтроллеров STM32 и платой STM32F0-Discovery, после изучения которых мне хотелось бы сваять свой девайс под нужные мне цели. К моему большому удивлению, такого большого комьюнити, статей, примеров, различных материалов по STM не было в таком же изобилии как для Arduino. Конечно, если поискать найдется множество статей «для начинающих» где описано, как и с чего начать. Но на тот момент мне показалось, что все это очень сложно, не рассказывались многие детали, интересные для пытливого ума новичка, вещи. Многие статьи хоть и характеризовались как «обучение для самых маленьких», но не всегда с их помощью получалось достичь требуемого результата, даже с готовыми примерами кода. Именно поэтому я решил написать небольшой цикл статей по программированию на STM32 в свете реализации конкретной задумки: пульт управления освещением в комнате. Во-первых, решающую роль сыграло отношение цена-функционал, разницу видно даже между одним из самых дешевых и простых МК от ST и достаточно «жирной» ATMega: Во-вторых, я предварительно для себя старался определить набор умений и навыков, которые бы я получил к моменту, когда я достигну требуемого результата. В случае если бы я решил использовать Arduino – мне было бы достаточно скопировать готовые библиотеки, накидать скетч и вуаля. Но понимание того, как работают цифровые шины, как работает радиопередатчик, как это всё конфигурируется и используется – при таком раскладе мне бы не пришло бы никогда. Для себя я выбрал самый сложный и тернистый путь, чтобы на пути достижения результата – я бы получил максимум опыта и знаний. В-третьих, любой STM32 можно заменить другим STM32, но с лучшими характеристиками. Причем без изменения схемы включения. В-четвертых, люди, занимающиеся профессиональной разработкой больше склонны к использованию 32-разрядных МК, и чаще всего это модели от NXP, Texas Instruments и ST Microelectronics. Да и мне можно было в любой момент подойти к своим инженерам из отдела разработки и разузнать о том, как решить ту или иную задачу и получить консультацию по интересующим меня вопросам. После Keil спросит нас какой МК будет использоваться в проекте. Выбираем нужный нам МК и нажимаем ОК
. Для того, чтобы сконфигурировать параметры проекта и настроить наш программатор нужно правым кликом по Target 1
открыть соответствующее меню. Для удобства можно настроить параметр, отвечающий за то, чтобы МК сбрасывался автоматически после перепрошивки. Для этого нужно поставить галочку в поле Reset and Run
. В Keil имеется удобный навигатор по проекту, в котором мы можем видеть структуру проекта, необходимые для работы справочные материалы, в т. ч. те, которые мы уже скачали к себе на компьютер до этого (схема Discovery, datasheet, reference manual), список функций, использованных в проекте и шаблоны для быстрой вставки разных языковых конструкций языка программирования. Что ж, теперь мы можем приступить к созданию нашей программы. Первым делом, необходимо подключить к нашему исполняемому файлу заголовочный документ нашего семейства микроконтроллеров. Добавим в файл main.c
строки следующего содержания, данная программа заставить попеременно моргать наши светодиоды: /* Заголовочный файл для нашего семейства микроконтроллеров*/
#include "stm32f0xx.h"
/* Тело основной программы */
int main(void)
{
/* Включаем тактирование на порту GPIO */
RCC->AHBENR |= RCC_AHBENR_GPIOCEN;
/* Настраиваем режим работы портов PC8 и PC9 в Output*/
GPIOC ->MODER = 0x50000;
/* Настраиваем Output type в режим Push-Pull */
GPIOC->OTYPER = 0;
/* Настраиваем скорость работы порта в Low */
GPIOC->OSPEEDR = 0;
while(1)
{
/* Зажигаем светодиод PC8, гасим PC9 */
GPIOC->ODR = 0x100;
for (int i=0; i<500000; i++){} // Искусственная задержка
/* Зажигаем светодиод PC9, гасим PC8 */
GPIOC->ODR = 0x200;
for (int i=0; i<500000; i++){} // Искусственная задержка
}
}
Данная статья является первой в планируемом цикле статей по изучению программирования микроконтроллеров. Изучая различные материалы я отметил, что практически все они начинаются с того, что новичку предлагается скачать (или использовать идущую со средой разработки) библиотеку для работы с периферийными устройствами и использовать ее для написания своей первой программы (обычно мигание светодиодом). Меня это сильно удивило. Если верить данным статьям, для программирования не обязательно даже читать документацию к программируемому контроллеру. Меня же учили премудростям «железного программирования»
совершенно иначе. В этой статье, путь от фразы «Да, я хочу попробовать!» до радостного подмигивания светодиода, будет значительно длиннее чем у других авторов. Я постараюсь раскрыть аспекты программирования микроконтроллеров, которые прячутся за использованием библиотечных функций и готовых примеров. Будем считать, что с типом микроконтроллера мы разобрались. Но на рынке представлен огромнейший спектр различных модификаций от разных производителей. Они отличаются по множеству параметров - от размера флеш памяти до количества аналоговых входов. Для каждой задачи выбор стоит производить индивидуально. Ни каких общих рекомендаций тут нет и быть не может. Отмечу лишь, что стоит начинать изучение с МК производителей имеющих как можно больший ассортимент. Тогда, при выборе МК для определенной задачи достаточно велик шанс, что из представленного ассортимента вам что-нибудь да подойдет. Я остановил свой выбор на STM32
(хотя и считаю, что лучше начинать изучение с МК от TexasInstruments - очень грамотно составлена документация), потому что они широко распространены среди российских разработчиков электроники. При возникновении проблем и вопросов вы сможете без труда найти решения на форумах. Еще одним плюсом является богатый выбор демонстрационных плат как от производителя, так и от сторонних организаций. Сам я использую демонстрационную плату STM3220G-EVAL
и программатор J-Link PRO
. Но для начала, будет вполне достаточно STM32F4DISCOVERY
, которую можно купить без особых проблем за небольшую сумму. Все примеры будут именно для отладочной платы STM32F4DISCOVERY
. На данном этапе нам будет совершенно не важно, что этой плате стоит МК на базе ядра Cortex-M4. В ближайшее время мы не будем использовать его особенности и преимущества над Cortex-M3. А как там будет дальше - посмотрим. Если у вас есть в наличии любая другая плата на базе STM32F2xx/STM32F4xx, вы сможете работать с ней. В изложении материала я постараюсь максимально подробно описывать почему
мы делаем именно так, а не иначе. Надеюсь ни у кого не возникнет проблем с переносом примеров на другое железо. Почему платная среда разработки?
Возможно, кто-то будет не совсем доволен тем, что я предлагаю использовать платную среду разработки, но в IAR есть возможность получить временную лицензию без ограничения функционала, либо безлимитную лицензию с ограничением по размеру кода (32КБ для МК это очень много). Перед нами появится пустой проект с main файлом. Теперь необходимо настроить проект для начала работы с «нашим» МК и отладчиком. На плате STM32F4DISCOVERY установлен MK STM32F407VG
. Его необходимо выбрать в свойствах проекта (General Options->Target->Device): При выборе целевого программируемого процессора происходит загрузка его описания, что дает широкие возможности для отладки (об этом будет идти речь ниже). Кроме того, автоматически присоединяется конфигурационный файл с описанием доступного адресного пространства для линкера. Если будет необходимо, мы затронем тему конфигурационного файла линкера в следующих статьях. После этого необходимо настроить отладчик. Отладка программы происходит непосредственно «в железе». Производится это с помощью JTAG отладчика. Более подробнее ознакомиться с тем, как это происходит можно на Википедии . На плату STM32F4DISCOVERY интегрирован отладчик ST-LINK/V2. Для работы с отладчиком необходимо выбрать его драйвер в меню Debugger->Setup->Driver
. Так же необходимо указать, что отладка должна производиться непосредственно в железе. Для этого необходимо поставить флаг Debugger->Download->Use flash loader(s)
Для тех, кто увидел слово Simulator
Теоретически, IAR позволяет отлаживать программы с использованием симулятора. Но я ни разу на практике не встречал его использования. Теперь проект готов для работы (программирования, заливки и отладки). Не будем отходить от классики. Первым проектом будет мигающий светодиод. Благо на плате их предостаточно.Что же это означает с точки зрения программирования? Первым делом необходимо изучить принципиальную схему демонстрационной платы и понять как «заводится» светодиод. Простейший анализ схемы говорит о том, что для того, что бы «зажечь» светодиод необходимо на пин МК подать «1» (которая для данного МК соответствует 3.3В). Выключение производится подачей на этот пин «0». На схеме этот пин обозначается PD13
(это, наверное, самая важная информация из этого документа). В итоге, мы можем написать «ТЗ» для нашей первой программы:
Начнем с того, что любой МК включает ядро, память и периферийные блоки. Думаю, что с памятью пока все понятно. Упомяну лишь, в STM32 есть флеш память в которой хранится программа МК (в общем случае это не верное утверждение, программа может храниться во внешней энергонезависимой памяти, но пока это опустим) и другие данные, в том числе и пользовательские. Так же есть SRAM - оперативная память. Ядро - часть микроконтроллера, осуществляющая выполнение одного потока команд. В нашем МК тип ядра - Cortex-M4. Ядро МК можно сравнить с процессором в ПК. Оно умеет только выполнять команды и передавать данные другим блокам (в этом сравнении не учитываются процессоры с интегрированными графическими ускорителями). Периферийные блоки - блоки осуществляющие взаимодействие с «внешним миром» или выполняющие специфические функции, недоступные ядру МК. Современные МК (в том числе и STM32) содержат огромный спектр периферийных блоков. Периферийные блоки предназначены для решения различных задач, от считывания значения напряжения с аналогового входа МК до передачи данных внешним устройствам по шине SPI. Пример
В качестве примера можно привести блок UART, который предназначен для приема и передачи данных от МК внешним устройствам. От ядра необходимо лишь сконфигурировать блок и отдать ему данные для передачи. После этого ядро может дальше выполнять инструкции. На плечи же периферийного блока ложится управление соответствующим выводом МК для передачи данных в соответствии с протоколом. Периферийный блок сам переводит выход МК в необходимое состояние «0» или «1» в нужный момент времени, осуществляя передачу. ВАЖНО:
После записи данных в спецрегистр и последующем чтении вы можете получить совершенно иные данные. Например, передача данных блоку UART для отправки, и считывание данных, полученных блоком от внешнего устройства, осуществляется с помощью одного и того же регистра. Спецрегистры обычно разделены на битовые поля. Один (или несколько) бит управляют определенным параметром периферийного блока, обычно независимо. Например, разные биты одного регистра управляют состоянием разных выходов МК. Запись данных по адресу в памяти
Предположим, что читая описание периферийного блока, мы поняли, что для его корректной работы необходимо записать в него число 0x3B. Адрес спецрегистра 0x60004012. Регистр 32-битный. Значение 0x60004012 есть не что иное, как значение указателя на ячейку памяти. Нужно именно это и указать в нашей программе, тоесть сделать преобразование типов согласно синтаксису языка C: (unsigned long*)(0x60004012)
Таким образом, у нас есть указатель на элемент. Теперь нужно в этот элемент записать необходимое значение. Делается это разыменовыванием указателя. Таким образом получаем правильную команду: *(unsigned long*)(0x60004012) = 0x3B;
Установка произвольных бит в 1
Предположим, что необходимо установить «1» в 7 и 1 биты по адресу 0x60004012, при этом не изменив значение всех остальных бит в регистре. Для этого необходимо использовать бинарную операцию |. Сразу приведу правильный ответ: *(unsigned long*)(0x60004012) |= 0x82;
Обратите внимание на 2 факта. Биты считаются с нулевого, а не с первого. Данная операция на самом деле занимает неменее 3 тактов - считывание значения, модификация, запись. Иногда это не допустимо, поскольку между считыванием и записью значение одного из бит, которые нам запрещено изменять, могло быть изменено периферийным блоком. Незабывайте про эту особенность, иначе могут полезть баги, которые крайне сложно отловить. Установка произвольных бит в 0
Предположим, что необходимо установить «0» в 7 и 1 биты по адресу 0x60004012, при этом не изменив значение всех остальных бит в регистре. Для этого необходимо использовать бинарную операцию &. Сразу приведу правильный ответ: *(unsigned long*)(0x60004012) &= 0xFFFFFF7D;
Или его более простою запись (не переживайте за лишнюю операцию, компилятор все заранее посчитает даже при минимальной оптимизации): *(unsigned long*)(0x60004012) &= (~0x82);
В первую очередь необходимо определиться с какими блоками предстоит работать. Для это достаточно изучит разделы Introduction
и Main features
. Непосредственное управление состоянием пинов МК осуществляется с помощью блока GPIO. Как указано в документации в МК STM32 может быть до 11 независимых блоков GPIO. Различные периферийные блоки GPIO принято называть портами. Порты обозначаются буквам от A до K. Каждый порт может содержать до 16 пинов. Как мы отметили ранее, светодиод подключается к пину PD13. Это означает, что управление этим пином осуществляется периферийным блоком GPIO порт D. Номер пина 13. Ни каких других периферийных блоков на это раз нам не понадобится. За включение тактирования периферийных блоков отвечают регистры RCC XXX peripheral clock enable register
.На месте XXX могут стоять шины AHB1, AHB2, AHB3, APB1 и APB2. После внимательного изучения описания соответствующих регистров, можно сделать вывод о том, тактирование периферийного блока GPIOD включается установкой «1» в третий бит регистра RCC AHB1 peripheral clock enable register (RCC_AHB1ENR)
: Теперь необходимо разобраться с тем, как узнать адрес самого регистра RCC_AHB1ENR
. Замечание:
Описание системы тактирования МК STM32 достойно отдельной статьи. Если у читателей возникнет желание, я подробнее освещу этот раздел в одной из следующих статей. Для получения адреса регистра, необходимо к начальному значению адресного пространства блока RCC прибавить Addr. offset
нужного регистра. Addres offset
указывается и в описании регистра (см. скриншот выше). В итоге, мы определили адрес регистра RCC_AHB1ENR
- 0x4002 3830. Сейчас же наша задача научиться управлять состоянием пинов МК. Перейдем сразу к описанию регистров GPIO. Как видно из описания для совершения требуемой нам настройки необходимо записать значение 01b в 26-27 биты регистра GPIOx_MODER
. Адрес регистра можно определить тем же методом, что описан выше. Используем регистр GPIO port bit set/reset register (GPIOx_BSRR)
Запись «0» или «1» в биты 0-16 приводят к соответствующему изменению состояния пинов порта. Для того, чтобы установить определенное значение на выходе одного или нескольких пинов МК и не изменить состояния остальных, необходимо будет пользоваться операцией модификации отдельных бит. Такая операция выполняется не менее чем за 3 такта. Если же необходимо в часть битов записать 1, а в другие 0, то понадобится не менее 4 тактов. Данный метод предпочтительнее всего использовать для изменения состояния выхода на противоположное, если его изначальное состояние не известно. GPIO port bit set/reset register (GPIOx_BSRR)
В отличии от предыдущего метода, запись 0 в любой из битов данного регистра не приведет ни к чему (да и вообще, все биты write-only!). Запись 1 в биты 0-15 приведет к установке «1» на соответствующем выходе МК. Запись 1 в биты 16-31 приведет к установке «0» на соответствующем выходе МК. Этот метод предпочтительнее предыдущего, если необходимо установить определенное значение на пине «МК», а не изменить его. Для того, чтобы этого избежать, обычно используется счетчик циклов, а переключение состояние пина МК происходит при прохождении программы определенного числа циклов. Но помимо этого, присутствует возможность просмотра значений регистров ядра, спецрегистров периферийных блоков (View->Register) и т.п. Спасибо всем, кто прочитал мой пост, получилось значительно больше чем я ожидал в начале. Недавно коллега меня подсадил на идею создания умного дома, я даже успел заказать себе десятки разных датчиков. Встал вопрос о выборе Микроконтроллера
(далее МК) или платы. После некоторых поисков нашёл несколько вариантов. Среди них были и Arduino
(включая его клоны, один из которых себе заказал ради того, чтобы просто побаловаться) и Launchpad
, но всё это избыточно и громоздко (хотя в плане программирования гораздо проще, но тему холиваров поднимать не буду, у каждого свои вкусы). В итоге решил определяться не с готовой платой, а взять только МК и делать всё с нуля. В итоге выбирал между Atmel ATtiny
(2313), Atmel ATmega
(решил отказаться т.к. не смог найти за адекватные деньги), STM32
(Cortex на ядре ARM
). С тинькой я уже успел побаловаться, так что взял себе STM32VL-Discovery
. Это можно назвать вступлением к циклу статей по STM32
. Оговорюсь сразу, автором большинства этих статей буду являться не я, т.к. сам только познаю, здесь я публикую их в первую очередь для себя, чтоб удобнее было искать если что-то забуду. И так поехали! Микроконтроллеры
семейства STM32
содержат в своём составе до семи 16-разрядных портов ввода-вывода c именами от PORTA до PORTG. В конкретной модели микроконтроллера
без исключений доступны все выводы портов, общее количество которых зависит от типа корпуса и оговорено в DataSheet на соответствующее подсемейство. Для включения в работу порта x необходимо предварительно подключить его к шине APB2 установкой соответствующего бита IOPxEN в регистре разрешения тактирования периферийных блоков RCC_APB2ENR
: RCC->APB2ENR |= RCC_APB2ENR_IOPxEN; // Разрешить тактирование PORTx.
Управление портами STM32
осуществляется при помощи наборов из семи 32-разрядных регистров: Режимы работы отдельных выводов определяются комбинацией битов MODEy
и CNFy
регистров GPIOx_CRL
и GPIOx_CRH
(здесь и далее: x-имя порта, y- номер бита порта). GPIOx_CRL
- регистр конфигурации выводов 0...7 порта x
: Структура регистра GPIOx_CRH
аналогична структуре GPIOx_CRL
и предназначена для управления режимами работы старших выводов порта (биты 8...15). Биты MODEy указанных регистров определяют направление вывода и ограничение скорости переключения в режиме выхода: Биты CNF задают конфигурацию выходных каскадов соответствующих выводов: С целью повышения помехоустойчивости все входные буферы содержат в своём составе триггеры Шмидта. Часть выводов STM32
, снабженных защитными диодами, соединёнными с общей шиной и шиной питания, помечены в datasheet как FT (5V tolerant) - совместимые с напряжением 5 вольт. Для защиты битов в регистрах конфигурации от несанкционированной записи в STM32
предусмотрен регистр блокировки настроек GPIOx_LCKR
Для защиты настроек отдельного вывода порта необходимо установить соответствующий бит LCKy. После чего осуществить последовательную запись в разряд LCKK
значений "1” - "0” - "1” и две операции чтения регистра LCKR
, которые в случае успешной блокировки дадут для бита LCKK
значения "0” и "1” . Защита настроечных битов сохранит своё действие до очередной перезагрузки микроконтроллера. Файл определений для периферии микроконтроллеров
STM32
stm32f10x.h определяет отдельные группы регистров, объединённые общим функциональным назначением (в том числе и GPIO
), как структуры языка Си, а сами регистры как элементы данной структуры. Например: GPIOC->BSRR
– регистр BSRR установки/сброса порта GPIOC.
#include "stm32F10x.h"
u32 tmp;
int main (void)
{
RCC->APB2ENR |= RCC_APB2ENR_IOPCEN; // Разрешить тактирование PORTC.
GPIOC->CRH |= GPIO_CRH_MODE8; // Вывод светодиода LED4 PC8 на выход.
GPIOC->CRH &=~GPIO_CRH_CNF8; // Двухтактный выход на PC8.
GPIOC->CRH |= GPIO_CRH_MODE9; // Вывод светодиода LED3 PC9 на выход.
GPIOC->CRH &=~GPIO_CRH_CNF9; // Двухтактный выход на PC9.
GPIOA->CRL&=~GPIO_CRL_MODE0; // Кнопка "USER" PA0 - на вход.
// Заблокировать настройки выводов PC8, PC9.
GPIOC->LCKR = GPIO_LCKR_LCK8|GPIO_LCKR_LCK9| GPIO_LCKR_LCKK;
GPIOC->LCKR = GPIO_LCKR_LCK8|GPIO_LCKR_LCK9;
GPIOC->LCKR = GPIO_LCKR_LCK8|GPIO_LCKR_LCK9| GPIO_LCKR_LCKK;
tmp=GPIOC->LCKR; tmp=GPIOC->LCKR;
}
Для записи и чтения портов предназначены входной GPIOx_IDR
и выходной GPIOx_ODR
регистры данных. Запись в выходной регистр ODR
порта настроенного на вывод осуществляет установку выходных уровней всех разрядов порта в соответствии с записываемым значением. Если вывод настроен как вход с подтягивающими резисторами, состояние соответствующего бита регистра ODR
активирует подтяжку вывода к шине питания (pull-up, ODR=1) или общей шине микроконтроллера (pull-down, ODR=0). Чтение регистра IDR
возвращает значение состояния выводов микроконтроллера настроенных как входы:
// Если кнопка нажата (PA0=1), установить биты порта C, иначе сбросить.
if (GPIOA->IDR & GPIO_IDR_IDR0) GPIOC->ODR=0xFFFF; else GPIOC->ODR=0x0000;
Для атомарного сброса и установки битов GPIO
в микроконтроллерах STM32
предназначен регистр GPIOx_BSRR
. Традиционный для архитектуры ARM
способ управления битами регистров не требующий применения операции типа "чтение-модификация-запись”
позволяет устанавливать и сбрасывать биты порта простой записью единицы в биты установки BS (BitSet)
и сброса BR (BitReset)
регистра BSRR
. При этом запись в регистр нулевых битов не оказывает влияния на состояние соответствующих выводов. GPIOx_BSRR
– регистр сброса и установки битов порта: GPIOC->BSRR=GPIO_BSRR_BS8|GPIO_BSRR_BR9; // Зажечь LED4 (PC8), погасить LED3.
GPIOC->BSRR=GPIO_BSRR_BS9|GPIO_BSRR_BR8; // Зажечь LED3 (PC9), погасить LED4.
Альтернативные функции GPIO
и их переназначение (remapping)
~(1<
PORTA&=~((1<<2)|(1<<3)); // Выводы 2 и 3 порта A сбросить в ноль.
DAC0->CTRL &= ~DAC_CTRL_DIFF; //сброс
…
PORTA ^=(1<< LED); // Погасить светодиод, если он светится и наоборот.
Для более подробного знакомства с операциями над переменными и языком Си в целом, рекомендую книгу "Язык программирования Си" Б. Керниган, Д. Ритчи.
Когда происходит и в чём заключается приведение типов? Таких ситуаций достаточно много. Рассмотрим наиболее опасные из них.
x=x+y;
Другой пример в этом же духе – присвоение дробного значения переменной целого типа:
b=a*b; // Ожидается, что в переменную b будет записано значение 4,5.
char b=3; // Объявлена целочисленная переменная.
Типичный пример неожиданности для этого случая – попытка получить дробное число делением двух целочисленных:
char b=4; // Объявлена целочисленная переменная.
float c; // Объявлена переменная "c" с плавающей точкой для сохранения результата.
c=a/b; // Ожидается, что "c" будет равно 0,75 (¾).
Более реалистичный пример из жизни – расчёт измеряемого напряжения из выходного кода АЦП:
float U; // Переменная с плавающей точкой для сохранения значения напряжения.
U= ADC*(5/1024); // Расчёт напряжения.
Приведённых ошибок также можно избежать, используя оператор явного приведения типов выражений языка Си, который записывается в виде названия типа, заключённого в круглые скобки и воздействует на выражение стоящее после него. Этот оператор приводит результат выражения к явно указанному типу, не взирая на типы его операндов:
U= ADC * ((float)5/1024); // Расчёт напряжения.
Такие функции могут вызываться программой только один раз. Зачем же тогда они нужны? Для обоснования такого подхода в литературе часто приводится фраза неизвестного, но по всей видимости, очень авторитетного древнеримского программиста: " Разделяй и властвуй!”. И действительно, программа, оформленная в виде целевых функциональных блоков гораздо проще для понимания, отладки и последующей модификации, чем набор отдельных, разрозненных по назначению кусков кода.
Обобщая сказанное, можно сформулировать формальные предпосылки к созданию функций в программе, это:
2. Желание структурировать программу в виде отдельных блоков с общим функциональным назначением.
Заголовок это самая первая строчка любой функции вида:
void initialization (void)
можно вызвать так:
Например, функция:
{
DDRA=0xFF; // PORTA на выход.
DDRB|=(1<<0)| (1<<3)| (1<<4); // PB0, PB3, PB4 на выход.
DDRC=0xF0; // Старшая тетрада PORTC на выход.
}
Для начала также важно знать, что тексте программы каждая функция должна быть расположена отдельно, то есть одна функция не может находиться внутри другой или частично накладываться на неё.
Эти данные называются параметрами, передаваемыми функции. Они должны быть перечислены через запятую вместе с их типами в заголовке функции, внутри круглых скобок после её имени:
{
if (FrameLength==8) UCSR0C|=((1<<1)|(1<<2));
if (StopBit==2) UCSR0C|=(1<<3);
}
Самая главная функция такого рода, как это видно и самого её названия это функция main. Она характеризуется тем, что выполнение передаётся на неё самим микроконтроллером при подаче питания или после перезагрузки, то есть, именно с неё и начинается работа любой программы. Еще одно свойство функции main состоит в том, что при её выполнении до конца программа автоматически перейдёт на её же начало, то есть она выполняется по циклу, если внутри её самим пользователем специально не был организован бесконечный цикл.
Ещё один вариант системных функций – обработчики прерываний. Их так же невозможно вызвать программно. Микроконтроллер самостоятельно передаёт управление на них в случае возникновения особых аппаратных состояний – условий вызова прерываний.
Структкра программы на Си
Далее последовательно выполняются строки 002, 003, 004, объёдинённые одним общим свойством: программа проходит по ним только один раз, при запуске микроконтроллера. Эту часть программы принято называть инициализационной. Инициализационная часть - законное место для размещения действий по подготовке периферии микроконтроллера к работе с заданными параметрами - настройки портов на вход или выход, начальной инициализации таймеров, задания скорости и формата кадра UART и так далее для всего, что планируется использовать в дальнейшем.
{
PORTA|=(1<<0); // Притянуть вход кнопки PORTA.0 внутренним pull-up резистором.
UCSRB = (1<
{
if (! (PINA & (1<<0))) // Если кнопка нажата...
{
while(! (UCSRA & (1<
}
// другие команды фона:
00N
00N+1
...
}
}
Часть действий, как то отслеживание флагов прерываний реализованы на аппаратном уровне. Другую часть, например, защиту от изменений в обработчике важного для программы регистра статуса SREG, сохранение адреса программы в стеке и многое другое компилятор берёт на себя.
Единственное, в чём остаётся необходимость это:
2. Разрешить вызов интересующего нас прерывания специальным битом в соответствующем регистре. Каким именно и где подскажет описание на микроконтроллер.
3. Создать условия для возникновения прерывания, например, если это переполнение таймера, то банально запустить его. Если это прерывание по изменению состояния внешнего вывода то задать нужные условия для этого (фронт, срез или нулевой уровень).
4. Разместить в программе обработчик прерывания, оформив его в соответствии с требованиями компилятора.
{
PORTD|=(1<<2); // Притянуть вход кнопки PORTD.2 внутренним pull-up.
UBRRL=51; // Скорость UART – 9600 bps.
UCSRB = (1<
GICR|=(1<
}
__interrupt void INT0_INTPT()
{
if (! (PIND & (1<<2))) {while(! (UCSRA & (1<
С чем это связано?
Если события, вызывающие прерывание, происходят достаточно часто, то на момент возникновения следующего прерывания слишком длинный обработчик может не успеть выполниться до конца. А это чревато неприятными последствиями в виде потери данных и нарушения нормальной последовательности действий. Например, если необходимо принять по UART некий массив байтов, то в обработчике, который вызывается после приёма каждого из них, не следует заниматься пристальным изучением принятых данных, а только переписывать их с заранее заготовленный массив. А уже после приёма последнего из них, в обработчике можно выставить соответствующий признак (мол, всё принято) и в фоне, обнаружив его, спокойно заняться исследованием всего принятого массива.
http://eugenemcu.ru/Почему не AVR/Arduino?
Предвосхищая высказывания о том, что неопытному новичку бросаться сразу же в изучение такого сложного МК как STM32 было бы рановато - я расскажу, почему я решил пойти именно этим путём, не вникая и не знакомясь с семейством процессоров от Atmel и даже не рассматривая Arduino как вариант.
После того, что я увидел значительные различия между ценой и возможностями AVR и STM32 – мною было принято решение, что AVR использовать в своей разработке я не буду =)Почему стоит начинать изучение микроконтроллеров STM32 с использования платы Discovery?
Как вы уже поняли, знакомство и изучение микроконтроллера STM32 мы начнем с Вами, уважаемые читатели, с использования платы Discovery. Почему именно Discovery, а не своя плата? 
Что нам понадобится для разработки помимо платы Discovery?
В своей работе с платой Discovery нам понадобится еще ряд незаменимых вещей, без которых мы не сможем обойтись:
Приступим к первоначальной настройке и подготовке IDE к работе!
После того, как скачается установочный файл нашей IDE можно приступать к установке. Следуя указаниям инсталлятора проведите процесс установки. После того, как скопируются все файлы, необходимые для работы появится окно установщика софтовых пакетов для разработки Pack Installer
. В данном установщике содержатся низкоуровневые библиотеки, Middleware, примеры программ, которые регулярно пополняются и обновляются.
Для начала работы с нашей платой нам необходимо установить ряд пакетов необходимых для работы и необходимо найти микроконтроллер, с которым мы будем работать. Так же можно воспользоваться поиском вверху окна. После того, как мы нашли наш МК кликаем на него и во второй половине окна и нам необходимо установить следующий перечень библиотек:
После установки требуемых паков можно перейти к настройке IDE и нашего отладчика/программатора. Для этого нам необходимо открыть главное окно Keil и создать новый проект. 
Для этого необходимо перейти в меню Project -> New uVision Project
и выбрать папку, в которую сохраним наш проект.
И вновь появится, уже знакомое нам, окно в котором мы можем подключить интересующие нас модули к проекту. Для нашего проекта понадобится два модуля:
Если все зависимости у подключаемых удовлетворены – менеджер будет нам сигнализировать об этом зеленым цветом:
После того как мы нажмем клавишу ОК
мы можем приступать к созданию нашего проекта. 
В главном меню проекта настраиваем параметр Xtal
в значение 8.0 MHz
. Данный параметр отвечает за частоту работы кварцевого осциллятора нашего МК:
Далее переходим к настройке нашего программатора/дебагер. Кликаем в этом же окне на вкладку Debug
и выбираем в поле Use
параметр ST-Link Debugger
и переходим в настройки:
В настройках мы должны увидеть модель нашего ST-Link установленного на плате, его серийный номер, версию HW и IDCODE МК который будем прошивать:

После этого нужно настроить еще одну опцию, которая позволит нам писать русскоязычные комментарии к коду наших проектов. Нажимаем кнопку Configuration
и в открывшемся меню в поле Encoding
выбираем Russian Windows-1251
. 
Всё. Наша IDE и программатор готовы к работе!
Переименуем папку в структуре проекта с Source Group 1
на App/User
, таким образом обозначив то, что в данной папке у нас будут располагаться файлы пользовательской программы:
Добавим основной файл программы через навигатор проекта, выполнив команду Add New Item To Group “App/User”
.
Необходимо выбрать из предложенного списка C File (.c)
и назначить ему имя main.c
:
Созданный файл автоматически добавится в структуру проекта и откроется в главном окне программы.
После того, как мы написали нашу программу, настала пора скомпилировать код и загрузить прошивку в наш МК. Чтобы скомпилировать код и загрузить можно воспользоваться данным меню:
Команда Build
(или горячая клавиша F7) скомпилирует код, и если не было никаких ошибок программе выведет в логе компиляции следующее сообщение о том, что ошибок и предупреждений нет:
Команда Load
(или горячая клавиша F8) загрузит компилированный код в наш МК и автоматически отправит его на исполнение:
После загрузки кода мы увидим, как светодиоды начали мигать с равными временными промежутками.
Ура! Первый шаг в освоении микроконтроллеров STM32 мы сделали! В мы разберем что такое битовые и логические операции, как ими пользоваться и узнаем об одной очень полезной утилитке для работы с МК, ну а пока можем наслаждаться тем, как весело перемигиваются светодиоды на нашей плате Discovery.)
Если вы намерены серьезно изучать программирование микроконтроллеров данная статья для вас. Возможно, она может заинтересовать и тех, кто вдоволь наигрался с Arduino и хочет получить в свои руки все аппаратные возможности железа.Выбор микроконтроллера
Многие могут сказать, что начинать изучение микроконтроллеров лучше с AVR, PIC, 8051 или чего-то еще. Вопрос многогранный и спорный. Я знаю достаточно примеров, когда люди изучив Cortex-M, программировали AVR, ARM7 и т.д. Сам же я начинал с Cortex-M3. Если перед вами стоит определенная задача, в интернете достаточно много информации со сравнением различных типов микроконтроллеров и решаемых с их помощью задач. На хабре этот вопрос тоже поднимался, например .Что необходимо для изучения?
К сожалению, для начала программирования МК не достаточно одного лишь ПК. Придется где-то раздобыть демонстрационную плату и программатор. Хотя это и уменьшает конкуренцию на рынке труда. Среда разработки
Как уже неоднократно упоминалось, для ARM микроконтроллеров существует достаточное количество сред разработки, как платных так и не очень. И снова хочется опустить полемику по этому поводу. Я использую IAR Embedded Workbench for ARM 6.60 . Все примеры будут именно в этой среде. Если вам по душе (или в вашей организации используется) что-то другое (Keil, Eclipse, CCS, CooCoc и т.д.) то это вам тоже не очень помешает. На особенности, связанные именно со средой разработки, я буду обращать отдельное внимание.
Помимо этого, сразу замечу, что для некоторых МК не существует бесплатных сред разработки. И к сожалению эти МК в некоторых областях незаменимы.
Процесс установки я описывать не буду.С чего начать?
Создание проекта
Для начала создадим пустой проект. IAR позволяет создать проекты на ASM, C и C++. Мы будем использовать C.


«ТЗ» для первого проекта
Подведем промежуточный итог:
МК и отладочная плата выбраны, проект подготовлен. Пора определиться с задачей.
доступен на сайте производителя. В данном описании даже есть отдельный раздел про светодиоды на плате -4.4 LEDs
. Для примера, будем использовать User LD3
. Найдем его на схеме:
Программа для МК должна переводить состояние пина МК PD13 из состояния «0» в состояние «1» и обратно с некоторой периодичностью, различимой для человеческого глаза (важное замечание, если моргать светодиодом слишком часто глаз может этого не различить).
Прежде чем приступать к программированию, или немного теории
Прежде чем приступить к реализации нашего ТЗ, необходимо понять как производится управление МК.
При этом производитель МК не разрабатывает ядро. Ядро покупается у компании ARM Limited . Главное отличие между различными МК - в периферии.
В отличии от ядра МК периферийные блоки не выполняют инструкции. Они лишь выполняют команды ядра. При этом участие ядра при выполнении команды не требуется.Взаимодействие ядра с периферийным блоком
Взаимодействие ядра МК с периферийным блоком осуществляется с помощью спецрегистров (есть еще взаимодействие через механизм прерываний и DMA, но об этом в следующих постах). С точки зрения ядра это просто участок памяти с определенным адресом, вот только на самом деле это не так
. Запись данных в спецрегистр эквивалентна передаче команды или данных периферийному блоку. Считывание - получение данных от блока или считывание его состояния. Описание периферийных блоков и их спецрегистров занимает львиную долю описания МК. Вспоминаем С
Если вы гуру в языке C, то можете смело пропускать данный раздел. Он предназначен в первую очередь для тех, кого учили (или ктоучился сам) программировать для ПК. Опыт показывает, что люди часто не помнят важных команд. Здесь я вкратце напомню про побитовые операции и работу напрямую с памятью по ее адресу.
Если вы сразу не знаете как это сделать, попробую описать цепочку рассуждений для получения правильной команды. Некоторые особенности программ для МК
Здесь я постараюсь описать некоторые особенности программ для МК, которые важно помнить. Вещи достаточно очевидные, но все же.
У программы нет конца
В отличии от большинства программ для ПК, программа для МК не должна заканчиваться, НИКОГДА! А что собственно должен будет делать МК после завершения вашей программы? Вопрос, практически, риторический. Поэтому не забываем убедиться в том, что вы не забыли вечный цикл. При желании, можно перевести МК в режим сна.
Пользуйтесь целочисленными переменными
Не смотря на то, что мы используем МК с ядром Cortex-M4, который аппаратно выполняет операции над числами с плавающей точкой, советую вам отказаться от их использования. В МК без поддержки таких операций время вычислений будет просто огромным.
Откажитесь от динамического выделения памяти
Это только совет. Причина проста - памяти мало. Я не раз встречался с библиотеками, в которых были «медленные утечки» памяти. Было очень неприятно, когда после нескольких недель стабильной работы МК зависал с ошибкой. Лучше заранее продумать архитектуру своей программы так, чтобы не пришлось использовать динамическое выделение памяти.
Если же все-таки хочется использовать - внимательно изучите работу менеджера памяти или пишите свой.Приступаем к работе!
Работа над программой для МК всегда начинается с чтения документации. Для нашего МК доступен на сайте производителя. Страниц много, но все читать пока
не нужно. Как уже было сказано, большую часть документации составляет описание периферийных блоков и их регистров. Так же хочу обратить внимание на то, что этот Reference Manual написан не для одного МК, а для нескольких линеек. Это говорит о том, что код будет переносим при переходе на другие МК в этих линейках (если конечно не пытаться использовать периферийные блоки которых нет в используемом МК).Управление тактированием периферийных блоков
Для снижения электропотребления МК практически все периферийные блоки после включения МК отключены. Включение/выключение блока производится подачей/прекращением подачи тактового сигнала на его вход. Для корректной работы, необходимо сконфигурировать контроллер тактового сигнала МК, чтобы необходимому периферийному блоку поступал тактовый сигнал.
Важно:
Периферийный блок не может начать работу сразу
после включения тактового сигнала. Необходимо подождать несколько тактов пока он «запустится». Люди, использующие библиотеки для периферийных устройств, зачастую даже не знают об этой особенности.
Определение адресов спецрегистров
Определение адресов спецрегистров необходимо начинать с чтения раздела Memory map
в Reference manual. Можно заметить, что каждому блоку выделен свой участок адресного пространства. Например, для блока RCC это участок 0x4002 3800 - 0x4002 3BFF:

Блок GPIO
Для общего ознакомления с блоком GPIO я настоятельно рекомендую полностью прочитать соответствующий раздел Reference Manual. Пока можно не особо обращать внимание на Alternate mode
. Это оставим на потом.Режим работы
В первую очередь необходимо установить режим работы 13 пина порта D как General purpose output mode
, что означает что блок GPIO будет управлять состоянием пина МК. Управление режимом работы пинов МК производитсяс помощью регистра GPIO port mode register (GPIOx_MODER) (x = A..I/J/K)
:
Настройка параметров работы выходных пинов порта GPIO
Блок GPIO позволяет применить дополнительные настройки для выходных пинов порта. Данные настройки производятся в регистрах:
Мы не будем менять данных параметров, поскольку нас вполне устраивают значения по умолчанию.Установка значения на пине МК
Наконец-то мы подошли к моменту управления состоянием выхода МК. Для утановки выходного значения на определенном пине МК есть два метода.

Зажигаем светодиод!
Найдя адреса всех необходимых регистров, можно написать программу, которая включает светодиод:
void main()
{
//Enable port D clocking
*(unsigned long*)(0x40023830) |= 0x8;
//little delay for GPIOD get ready
volatile unsigned long i=0;
i++; i++; i++;
i=0;
//Set PD13 as General purpose output
*(unsigned long*)(0x40020C00) = (*(unsigned long*)(0x40020C00)& (~0x0C000000)) | (0x04000000);
//Turn LED ON!
*(unsigned long*)(0x40020C14) |= 0x2000;
while(1);
}
Можно компилировать (Project->Compile
) и заливать (Project->Download->Download active application
). Или запустить отладку (Project->Dpwnload and Debug
) и начать выполнение (F5).
Светодиод загорелся!Мигаем светодиодом
Мигание светодиода есть ни что иное, как попеременное включение и выключение с задержкой между этими действиями. Самый простой способ - поместить включение и выключение в вечный цикл, а между ними вставить задержку.
void main()
{
//Enable port D clocking
*(unsigned long*)(0x40023830) |= 0x8;
//little delay for GPIOD get ready
volatile unsigned long i=0;
i++; i++; i++;
i=0;
//Set PD13 as General purpose output
*(unsigned long*)(0x40020C00) = (*(unsigned long*)(0x40020C00)& (~0x0C000000)) | (0x04000000);
while(1)
{
//Turn LED ON
*(unsigned long*)(0x40020C14) |= 0x2000;
//Delay
for(i=0; i<1000000 ;++i);
//Turn LED OFF
*(unsigned long*)(0x40020C14) &= ~0x2000;
//Delay
for(i=0; i<1000000 ;++i);
}
}
Значение 1000000 в задержке подобрано экспериментально так, чтобы период мигания светодиода был различим глазом, но и не был слишком велик.Оптимизируем алгоритм
Минусом выбранного подхода миганием светодиодом является то, что ядро МК большую часть времени проводит в пустых циклах, хотя мог бы заниматься чем-нибудь полезным (в нашем примере других задач нет, но в будущем они появятся).
void main()
{
//Enable port D clocking
*(unsigned long*)(0x40023830) |= 0x8;
//little delay for GPIOD get ready
volatile unsigned long i=0;
i++; i++; i++;
i=0;
//Set PD13 as General purpose output
*(unsigned long*)(0x40020C00) = (*(unsigned long*)(0x40020C00)& (~0x0C000000)) | (0x04000000);
while(1)
{
i++;
if(!(i%2000000))
{
//Turn LED ON
*(unsigned long*)(0x40020С14) |= 0x2020;
}
else if(!(i%1000000))
{
//Turn LED OFF
*(unsigned long*)(0x40020С14) &= ~0x2000;
}
}
}
Но и тут не обойдется без проблем, с изменением количества команд выполняемых внутри цикла, будет меняться период мигания светодиодом (или период выполнения других команд в цикле). Но на данном этапе мы не можем с этим бороться.Немного об отладке
IAR позволяет осуществлять отладку приложения непосредственно в железе. Все выглядит практически так же, как и отладка приложения для ПК. Есть режим пошагового выполнения, входа в функцию, просмотр значения переменных (В режиме отладки View->Watch->Watch1/4
).
Я настоятельно рекомендую ознакомиться с возможностями дебаггера во время изучения программирования МК.Несколько слов в заключение
Возможно, многие скажут, что ручное прописывание адресов в программе это не правильно, поскольку производитель предоставляет файлы с определениями регистров и битовых полей, библиотеки для работы с периферией и другие инструменты, облегчающие жизнь разработчику. Я с этим полностью согласен, но все равно считаю, что первые шаги в программировании МК необходимо делать перекапывая документацию к вручную, самостоятельно определяя необходимые регистры и битовые поля. В дальнейшем этим можно не пользоваться, но уметь нужно обязательно.
Приведу лишь несколько причин для этого утверждения:
Жду ваших комментариев и аргументированной критики. Если у прочитавших возникнет желание - постараюсь продолжить цикл статей. Возможно у кого-то есть идеи по поводу тем, которые стоило бы осветить - я был бы рад их услышать.Общие сведения
Режимы работы выводов GPIO
в режиме входа:
в режиме выхода:
Защита битов конфигурации GPIO
GPIOx_LCKR
- регистр блокировки настроек вывода порта:
Воспользуемся определениями из файла stm32f10x.h для иллюстрации работы с регистрами ввода-вывода микроконтроллера STM32F100RB
установленного в стартовом наборе STM32VLDISCOVERY
:Запись и чтение GPIO
Сброс и установка битов порта
Практически все внешние цепи специального назначения STM32
(включая выводы для подключения кварцевых резонаторов, JTAG/SWD
и так далее) могут быть разрешены на соответствующих выводах микроконтроллера, либо отключены от них для возможности их использования в качестве выводов общего назначения. Выбор альтернативной функции вывода осуществляется при помощи регистров с префиксом "AFIO
”_.
Помимо этого регистры AFIO
_ позволяют выбирать несколько вариантов расположения специальных функций на выводах микроконтроллера. Это в частности относится к выводам коммуникационных интерфейсов, таймеров (регистры AFIO_MAPR
), выводам внешних прерываний (регистры AFIO_EXTICR
) и т. д.